
Robotic Assembly Using Deep Reinforcement Learning
Introduction
Disclaimer: This article is a cross post from Pytorch Medium Blog Post.
One of the most exciting advancements, that has pushed the frontier of the Artificial Intelligence (AI) in recent years, is Deep Reinforcement Learning (DRL). DRL belongs to the family of machine learning algorithms. It assumes that intelligent machines can learn from their actions similar to the way humans learn from experience. Over the recent years we could witness some impressive real-world applications of DRL. The algorithms allowed for major progress especially in the field of robotics. If you are interested in learning more about DRL, we encourage you to get familiar with the exceptional Introduction to RL by OpenAI. We believe this is the best place to start your adventure with DRL.
The goal of this tutorial is to show how you can apply DRL to solve your own robotic challenge. For the sake of this tutorial we have chosen one of the classic assembly tasks: peg-in-hole insertion. By the time you finish the tutorial, you will understand how to create a complete, end-to-end pipeline for training the robot in the simulation using DRL.
The accompanying code together with all the details of the implementation can be found in our GitHub repository.
Setup
-
Download the robot simulation platform, CoppeliaSim, from the official website. This tutorial is compatible with the version 4.1.0.
-
Setup toolkit for robot learning research, PyRep, from their github repository. PyRep library is built on top of CoppeliaSim to facilitate prototyping in python.
-
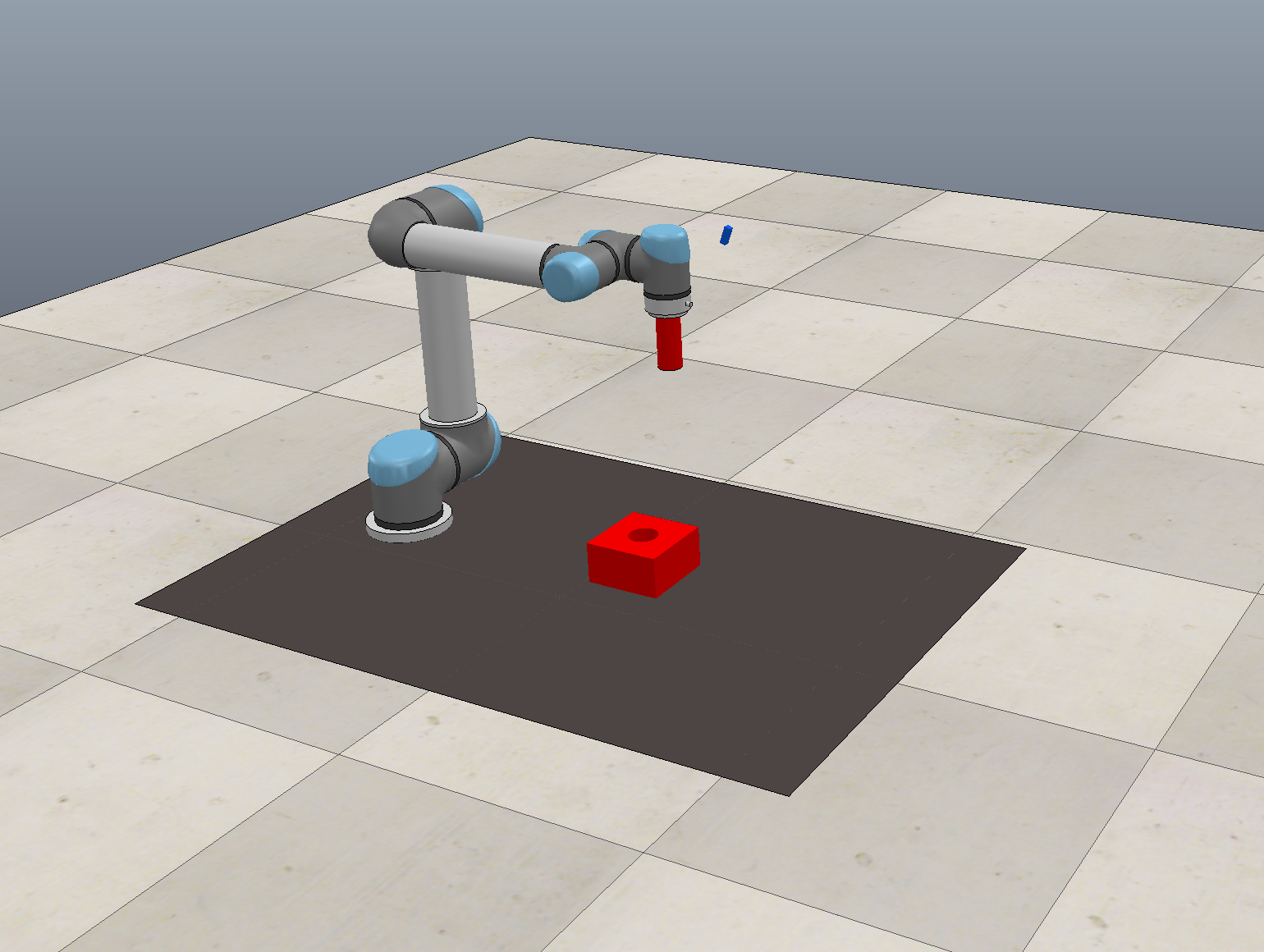
Create an environment for the RL agent: It could be either a simulation or a real environment. We limit ourselves to simulation for faster prototyping and training. The agent interacts with the environment to collect experience. This allows it to learn a policy which maximizes the expected (discounted) sum of future rewards and hence solves the designed task. Most RL practitioners are familiar with the OpenAI Gym environments, a toolkit with toy environments used for developing and benchmarking reinforcement learning algorithms. However, our use case, robotic assembly task, is very specific. The goal is to train a robot to perform peg-in-hole insertion. This is why we created our simulation environment in CoppeliaSim. The simulator comes with various robot manipulators and grippers. For our tutorial, we picked UR5 robot with RG2 gripper (Figure 1).
CoppeliaSim caters to a variety of different robotic tasks. Feel free to come up with your own challenge and design your own simulation! RLBench (the robot learning benchmark and learning environment) also provides more off-the-shelf, advanced simulation environments.
- Create a gym environment wrapped around the simulation scene:
import os
import cv2
import logging
import numpy as np
from gym import Space
from gym.spaces.box import Box
from gym.spaces.dict import Dict
from pyrep import PyRep, objects
from catalyst_rl.rl.core import EnvironmentSpec
from catalyst_rl.rl.utils import extend_space
class CoppeliaSimEnvWrapper(EnvironmentSpec):
def __init__(self, visualize=True,
mode="train",
**params):
super().__init__(visualize=visualize, mode=mode)
# Scene selection
scene_file_path = os.path.join(os.getcwd(), 'simulation/UR5.ttt')
# Simulator launch
self.env = PyRep()
self.env.launch(scene_file_path, headless=False)
self.env.start()
self.env.step()
# Task related initialisations in Simulator
self.vision_sensor = objects.vision_sensor.VisionSensor("Vision_sensor")
self.gripper = objects.dummy.Dummy("UR5_target")
self.gripper_zero_pose = self.gripper.get_pose()
self.goal = objects.dummy.Dummy("goal_target")
self.goal_STL = objects.shape.Shape("goal")
self.goal_STL_zero_pose = self.goal_STL.get_pose()
self.grasped_STL = objects.shape.Shape("Peg")
self.stacking_area = objects.shape.Shape("Plane")
self.vision_sensor = objects.vision_sensor.VisionSensor("Vision_sensor")
self.step_counter = 0
self.max_step_count = 100
self.target_pose = None
self.initial_distance = None
self.image_width, self.image_height = 320, 240
self.vision_sensor.set_resolution((self.image_width, self.image_height))
self._history_len = 1
self._observation_space = Dict(
{"cam_image": Box(0, 255,
[self.image_height, self.image_width, 1],
dtype=np.uint8)})
self._action_space = Box(-1, 1, (3,))
self._state_space = extend_space(self._observation_space, self._history_len)
@property
def history_len(self):
return self._history_len
@property
def observation_space(self) -> Space:
return self._observation_space
@property
def state_space(self) -> Space:
return self._state_space
@property
def action_space(self) -> Space:
return self._action_space
def step(self, action):
done = False
info = {}
prev_distance_to_goal = self.distance_to_goal()
# Make a step in simulation
self.apply_controls(action)
self.env.step()
self.step_counter += 1
# Reward calculations
success_reward = self.success_check()
distance_reward = (prev_distance_to_goal - self.distance_to_goal()) / self.initial_distance
reward = distance_reward + success_reward
# Check reset conditions
if self.step_counter > self.max_step_count:
done = True
logging.info('--------Reset: Timeout--------')
elif self.distance_to_goal() > 0.8:
done = True
logging.info('--------Reset: Too far from target--------')
elif self.collision_check():
done = True
logging.info('--------Reset: Collision--------')
return self.get_observation(), reward, done, info
def reset(self):
logging.info("Episode reset...")
self.step_counter = 0
self.env.stop()
self.env.start()
self.env.step()
self.setup_scene()
observation = self.get_observation()
return observation
# -------------- all methods above are required for any Gym environment, everything below is env-specific --------------
def distance_to_goal(self):
goal_pos = self.goal.get_position()
tip_pos = self.gripper.get_position()
return np.linalg.norm(np.array(tip_pos) - np.array(goal_pos))
def setup_goal(self):
goal_position = self.goal_STL_zero_pose[:3]
# 2D goal randomization
self.target_pose = [goal_position[0] + (2 * np.random.rand() - 1.) * 0.1,
goal_position[1] + (2 * np.random.rand() - 1.) * 0.1,
goal_position[2]]
self.target_pose = np.append(self.target_pose,
self.goal_STL_zero_pose[3:]).tolist()
self.goal_STL.set_pose(self.target_pose)
# Randomizing the RGB of the goal and the plane
rgb_values_goal = list(np.random.rand(3,))
rgb_values_plane = list(np.random.rand(3,))
self.goal_STL.set_color(rgb_values_goal)
self.stacking_area.set_color(rgb_values_plane)
self.initial_distance = self.distance_to_goal()
def setup_scene(self):
self.setup_goal()
self.gripper.set_pose(self.gripper_zero_pose)
def get_observation(self):
cam_image = self.vision_sensor.capture_rgb()
gray_image = np.uint8(cv2.cvtColor(cam_image, cv2.COLOR_BGR2GRAY) * 255)
obs_image = np.expand_dims(gray_image, axis=2)
return {"cam_image": obs_image}
def collision_check(self):
return self.grasped_STL.check_collision(
self.stacking_area) or self.grasped_STL.check_collision(self.goal_STL)
def success_check(self):
success_reward = 0.
if self.distance_to_goal() < 0.01:
success_reward = 0.01
logging.info('--------Success state--------')
return success_reward
def apply_controls(self, action):
gripper_position = self.gripper.get_position()
# predicted action is in range (-1, 1) so we are normalizing it to physical units
new_position = [gripper_position[i] + (action[i] / 200.) for i in range(3)]
self.gripper.set_position(new_position)
For our reinforcement learning project we use Catalyst RL, a distributed framework for reproducible RL research. This is just one of the elements of the marvellous Catalyst project. Catalyst is a PyTorch ecosystem framework for Deep Learning research and development. It focuses on reproducibility, rapid experimentation and codebase reuse. This means that the user can seamlessly run training loop with metrics, model checkpointing, advanced logging and distributed training support without the boilerplate code. We strongly encourage you to get familiar with the Intro to Catalyst and incorporating the framework into your daily work!
We reuse its general Catalyst RL environment (EnvironmentSpec) class to create our custom environment. By inheriting from the EnvironmentSpec, you can quickly design your own environment, be it an Atari game, classic control task or robotic simulation. Finally, we specify states/observations, actions and rewards using OpenAI’s gym spaces type.
A brief summary of the CoppeliaSimEnvWrapper in src/env.py
This class wraps around the general RL environment class to launch the CoppeliaSim with our custom scene. Additionally, in the beginning of every episode, it initialises the properties of the mating part: 2D position in the workspace (setup_goal() method), as well as its colour.
The environment wrapper contains following methods:
-
get_observation(), capture a grayscale image as an observation. -
distance_to_goal(), compute the distance between the target and current position. The distance is used in reward design. -
success_check(), check whether the goal state is reached. If yes, significantly boost agent’s reward. -
collision_check(), check whether an agent collided with any object.
Episode termination occurs when the robot gets too far from the target, collides with any object in the environment or exceeds the maximum number of time steps. Those conditions are specified at the end of step() method and are checked at each step taken in the environment by the agent. Once the episode terminates, the whole cycle is repeated for the next episode.
Defining the RL algorithm
So far we have created an environment and specified how the agent can act (action space) and what the agent observes (observation space). But the intelligence of the robot is determined by the neural network. This “brain” of the robot is being trained using Deep Reinforcement Learning. Depending on the modality of the input (defined in self.observation_space property of the environment wrapper) , the architecture of agent’s brain changes. It could be a multi-layer perceptron (MLP) or a convolutional neural network (CNN).
Catalyst provides an easy way to configure an agent using a YAML file. Additionally, it provides implementations of state-of-the-art RL algorithms like PPO, DDPG, TD3, SAC etc. One could pick the type of the algorithm by changing algorithm: variable in configs/config.yml. The hyper-parameters related to training can also be configured here.
In this tutorial, an off-policy, model-free RL algorithm TD3 is used.
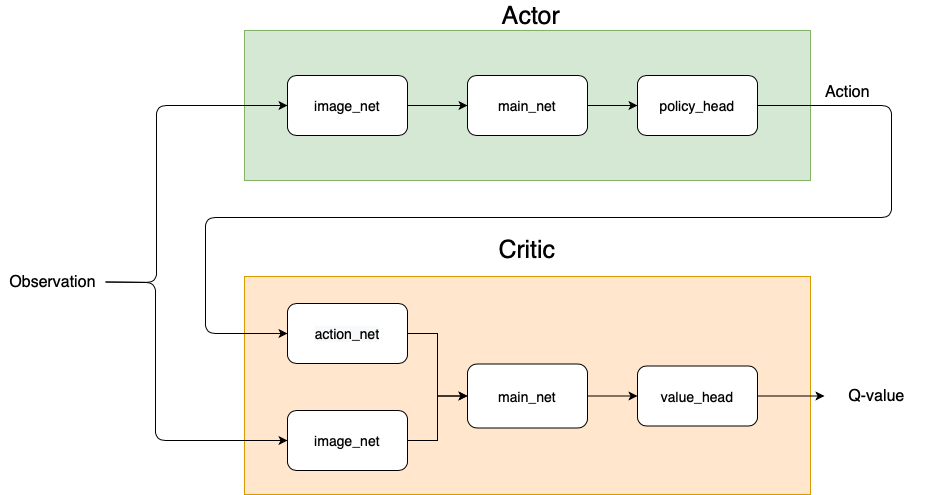 Figure 2: Architecture of the actor and critic in our TD3 algorithm.
Figure 2: Architecture of the actor and critic in our TD3 algorithm.As depicted in Figure 2, the actor and critic(s) (TD3 concurrently learns two value networks) are modelled as agent classes in Catalyst. We customize them and configure the config file by setting agent: UR5Actor and agent: UR5StateActionCritic. The details of the neural network architecture for both actor and critic(s) can be configured by further editing the YAML file.
The CNN network image_net, used to process camera images, can be created as shown below. The layers of network are defined by channels , bias , dropout , normalization (booleans) and activation functions (strings). These parameters are used by the function get_convolution_net in src/network.py.
image_net_params:
history_len: *history_len
channels: [16, 32, 32, 32, 16]
use_bias: True
use_groups: False
use_normalization: True
use_dropout: False
activation: ReLU
A MLP can be created using the block shown below. In our example, main_net, action_net are created
in similar fashion through get_linear_net function.
features: [64, 64]
use_bias: False
use_normalization: False
use_dropout: False
activation: ReLU
Once the actor and critic network architectures are defined, we are ready to start the training.
Training
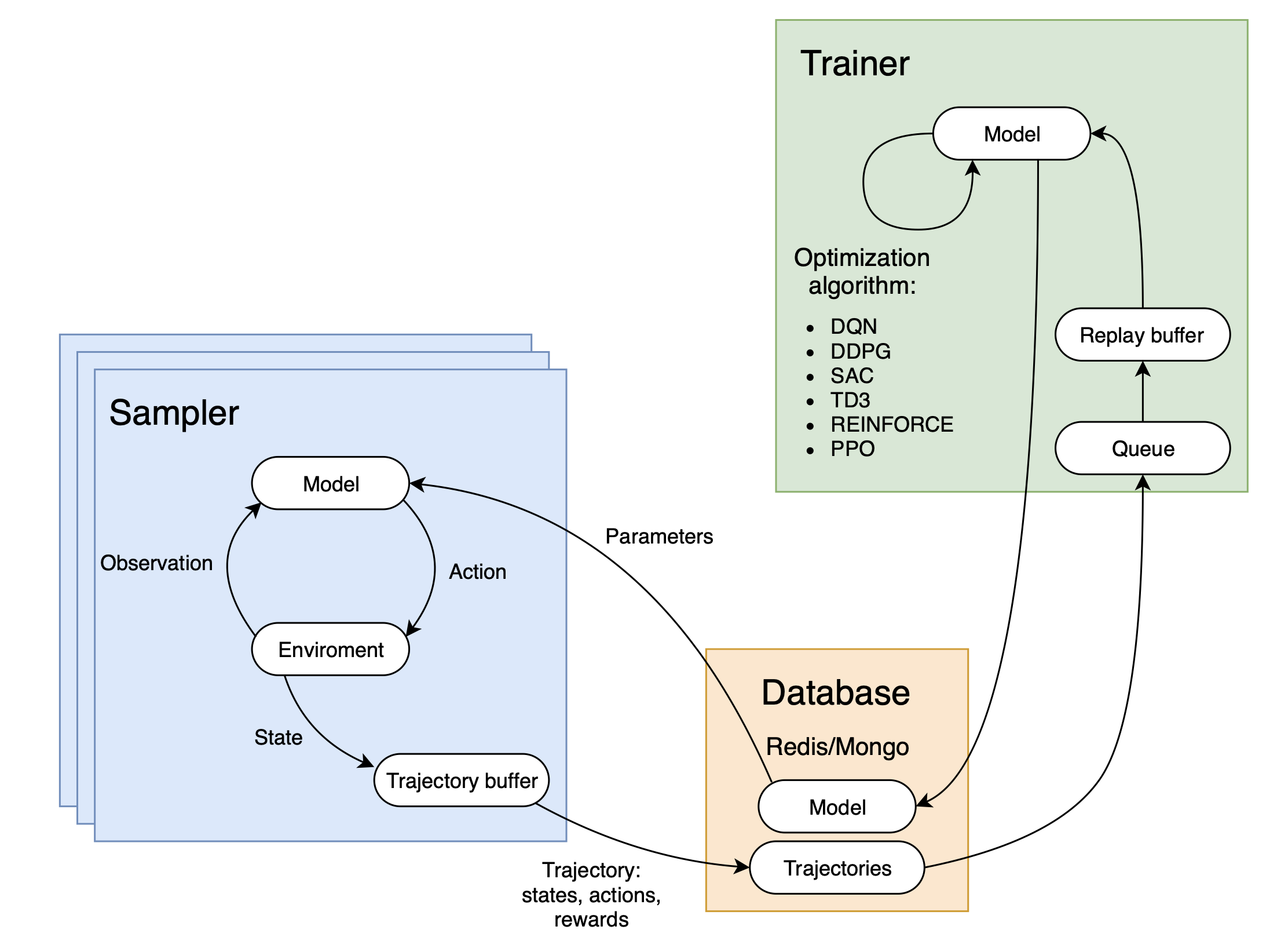
Once the parameters of trainer and sampler (in the tutorial we use a single sampler) are configured, the training process can be started by launching scripts/run-training.sh.
This opens a tmux session, which starts sampler, trainer, database, and tensorboard to monitor the training process.
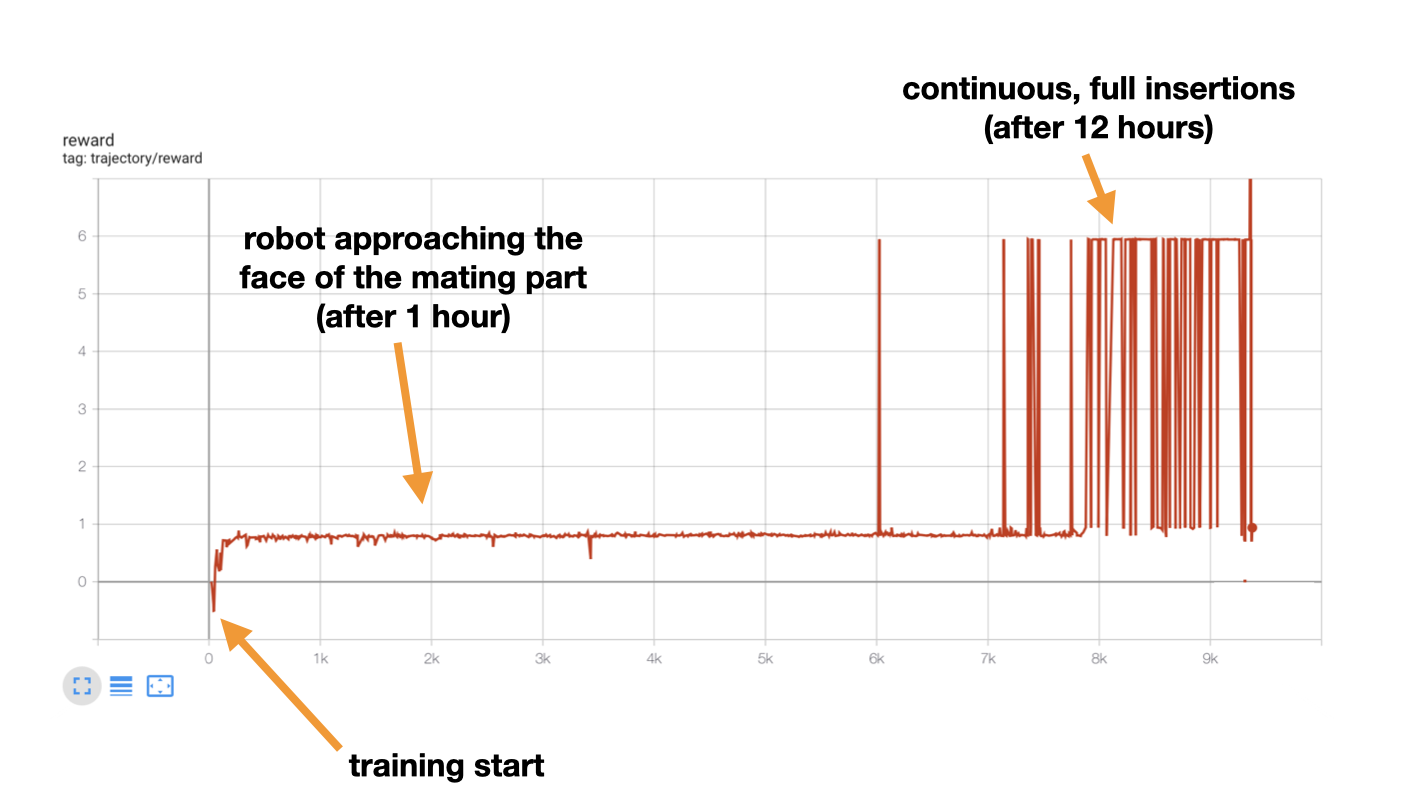
Once you clone our repository, install CoppeliaSim and PyRep, you are ready to start training. Even though Catalyst is very much focused on reproducibility, due to asynchronous manner of training we can not guarantee the convergence of the training pipeline. If you don’t see a progress of the robot after ~1h of training, you can try changing random seed, noise and action step values. In any case, we encourage you to play with the parameters and alter the code to your liking.
You can launch the pipeline by running scripts/run-training.sh. The moment the training starts, the agents progress can be also monitored visually in the CoppeliaSim simulation.
Final Results
Once the policy converges, you can either test it (run inference) in the simulator or directly on the real robot. This is can be done by editing configs/config_inference.yml and passing the path of converged policy (.pth file) to resume: variable. Finally, launch run scripts/run-inference.sh.
Inference on a real robot
About the Team
This tutorial is based on the research done at ARRIVAL by the outstanding robotics team:
The team is creating flexible factories of the future for the assembly of Arrival electric vehicles. One of the topics we are actively working on is transferring the knowledge obtained in the simulation to the physical robot. We encourage you to check out our recent research publication: Sim2Real for Peg-Hole Insertion with Eye-in-Hand Camera. If you have any questions about the contents of that tutorial or simply want to chat about robots, feel free to reach out to us!